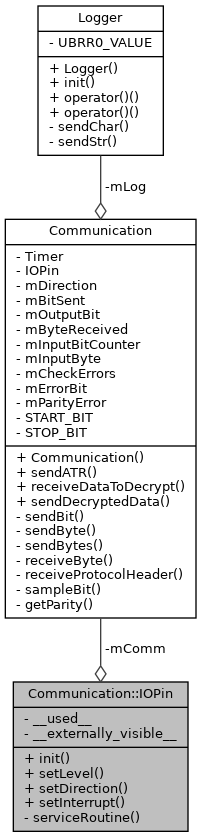
Class that provides functionality for the ATmega644's PinB6, such as an ISR.
More...
|
| static void | init (Communication *comm) |
| | Initialize the IOPin class.
|
| |
| static void | setLevel (const bit_t bit) |
| | Set logical level of the Pin.
|
| |
| static void | setDirection (const PinDir direction) |
| | Set the direction of the Pin.
|
| |
| static void | setInterrupt (const bool enabled) |
| | Enable/disable interrupts for the Pin.
|
| |
|
|
static void | serviceRoutine () __asm__("__vector_5") __attribute__((__signal__ |
| | Interrupt Service Routine for the IOPin. An interrupt is triggered if the logic-level of the Pin changes.
|
| |
|
|
static void | __used__ |
| |
|
static void | __externally_visible__ |
| |
Class that provides functionality for the ATmega644's PinB6, such as an ISR.
- Authors
- Philipp Karg (phili.nosp@m.pp.k.nosp@m.arg@t.nosp@m.um.d.nosp@m.e)
- Date
- 05.06.2022
- Copyright
- Philipp Karg 2022
◆ init()
Initialize the IOPin class.
- Copy the address of the provided Communication pointer,
comm to mComm.
- Enable interrupts for Pins 8-15.
- Parameters
-
◆ setDirection()
| static void Communication::IOPin::setDirection |
( |
const PinDir |
direction | ) |
|
|
static |
Set the direction of the Pin.
- Parameters
-
| [in] | direction | (const PinDir): Direction to set (PinDir::INPUT or PinDir::OUTPUT). |
◆ setInterrupt()
| static void Communication::IOPin::setInterrupt |
( |
const bool |
enabled | ) |
|
|
static |
Enable/disable interrupts for the Pin.
- Parameters
-
| [in] | enabled | (const bool): Whether interrupts should be enabled or not. |
◆ setLevel()
| static void Communication::IOPin::setLevel |
( |
const bit_t |
bit | ) |
|
|
static |
Set logical level of the Pin.
- Parameters
-
| [in] | bit | (const bit_t): Level to set (0 or 1). |
The documentation for this class was generated from the following file: